工程技術(shù)研究院")
常州江蘇大學(xué)工程技術(shù)研究院
Changzhou Engineering and Technology Institute of Jiangsu University
歡迎訪問常州江蘇大學(xué)工程技術(shù)研究院!
【成果簡介】
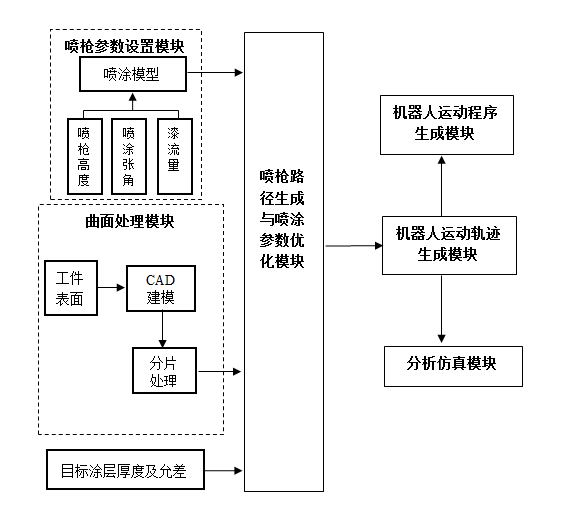
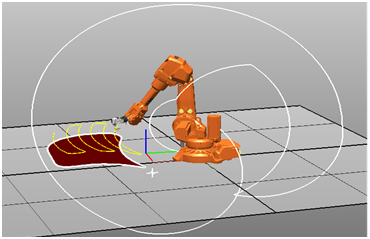
該成果基于機(jī)器人離線編程方法對復(fù)雜形面進(jìn)行數(shù)字化噴涂軌跡規(guī)劃,以解決目前人工示教編程方法示教周期長、噴涂質(zhì)量不穩(wěn)定的問題。通過對噴涂過程中的涂膜厚度分布模型進(jìn)行建模,對大型噴涂表面進(jìn)行分片處理,對影響噴涂質(zhì)量、噴涂效率和涂料利用率的噴涂路徑生成算法和噴涂過程中的噴涂速率、噴槍位姿進(jìn)行優(yōu)化研究,形成噴涂軌跡規(guī)劃知識(shí)庫,結(jié)合現(xiàn)有的離線編程軟件進(jìn)行噴涂軌跡規(guī)劃二次開發(fā),實(shí)現(xiàn)復(fù)雜形面高質(zhì)高效綠色噴涂軌跡的自動(dòng)規(guī)劃。
目前該項(xiàng)成果尚處于研發(fā)階段,目前已累計(jì)授權(quán)發(fā)明專利5件,該成果轉(zhuǎn)化后對完善噴涂機(jī)器人離線編程系統(tǒng),提升機(jī)器人噴涂自動(dòng)化水平具有重要的工程應(yīng)用價(jià)值,能加速噴涂機(jī)器人在復(fù)雜形面零件涂裝中的推廣應(yīng)用,經(jīng)濟(jì)效益顯著。希望能與機(jī)器人工業(yè)軟件公司、機(jī)器人集成商進(jìn)行合作。
【擬合作方式】
合作開發(fā),技術(shù)咨詢,技術(shù)服務(wù)



")
