工程技術(shù)研究院")
常州江蘇大學(xué)工程技術(shù)研究院
Changzhou Engineering and Technology Institute of Jiangsu University
歡迎訪問常州江蘇大學(xué)工程技術(shù)研究院!

骨修復(fù)材料生物活性玻璃
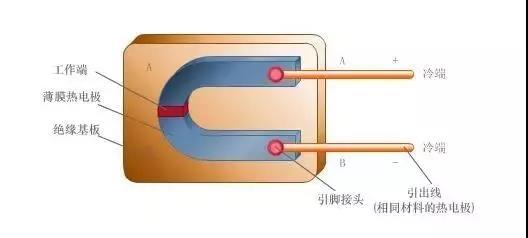
一種多電極傳感結(jié)構(gòu)

線性控制制動(dòng)踏板裝置
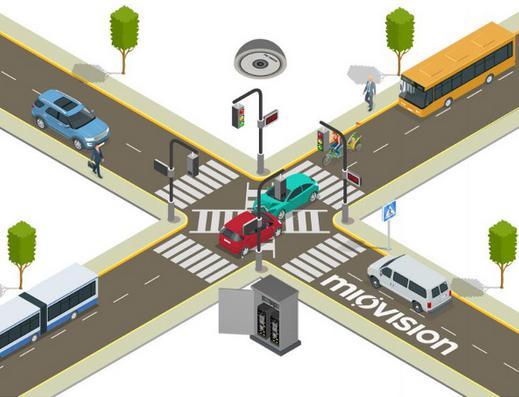
基于車聯(lián)網(wǎng)的車輛控制技術(shù)與應(yīng)用

溫室/果園智能風(fēng)送噴霧機(jī)
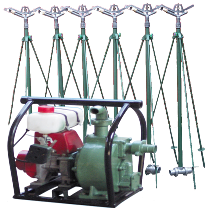
輕小型移動(dòng)式噴灌機(jī)組設(shè)計(jì)

一種具有抗菌特性的蛋白纖維

無線能量傳輸系統(tǒng)

Fe-Cr-B合金軋輥

低合金余熱淬火馬氏體球墨鑄鐵磨球



")
